Gait Optimization (GO) Lab
Introduction

The Gait Optimization Lab at the Pennsylvania State University studies human walking patterns. The team focuses on techniques to enhance human rehabilitation. To investigate gait, they utilize methodologies initially developed for robots, which have been adapted to more closely mimic human motion. Moreover, the lab employs various engineering tools, including optimization, controls, and mechanism design.
Main Advisor: Anne Martin,Associate Professor, Penn State Mechanical Engineering Department
Click for more details about the GO Lab
Automated Gait Cycle Detection for Exoskeleton-Assisted Walking
2023-2024
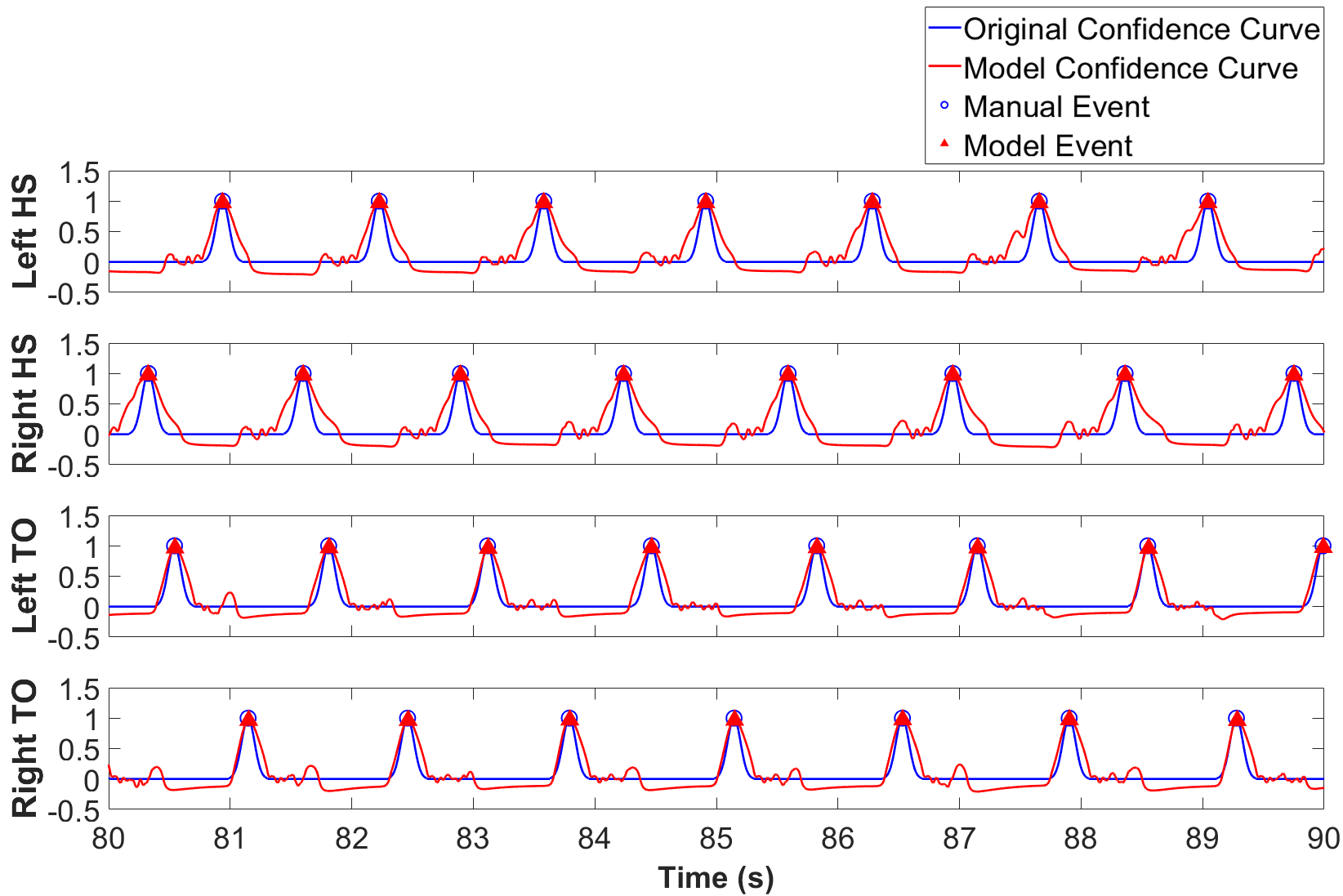
This study develops a machine learning-based method for accurate detection of critical gait events—heel strike (HS) and toe off (TO)—in exoskeleton-assisted walking, where traditional methods often fail. Utilizing both ground reaction force and kinematic data, we trained two separate LSTM models to enhance event detection. The models processed 113,236 events, achieving over 98% accuracy for HS and 99% for TO within 16ms of manual events, significantly surpassing previous techniques. This approach not only demonstrates superior precision and robust generalizability but also significantly reduces the labor required in gait analysis, making it an effective tool for clinical and research applications.
Access the MATLAB scripts and sample data for this study from the Penn State Data CommonsPublication:
Chen, X., Martin, A., Automated gait event detection for exoskeleton-assisted walking using a long short-term memory model with ground reaction force and heel marker data., PLoS One. 2025 Feb 10;20(2):e0315186. https://doi.org/10.1371/journal.pone.0315186
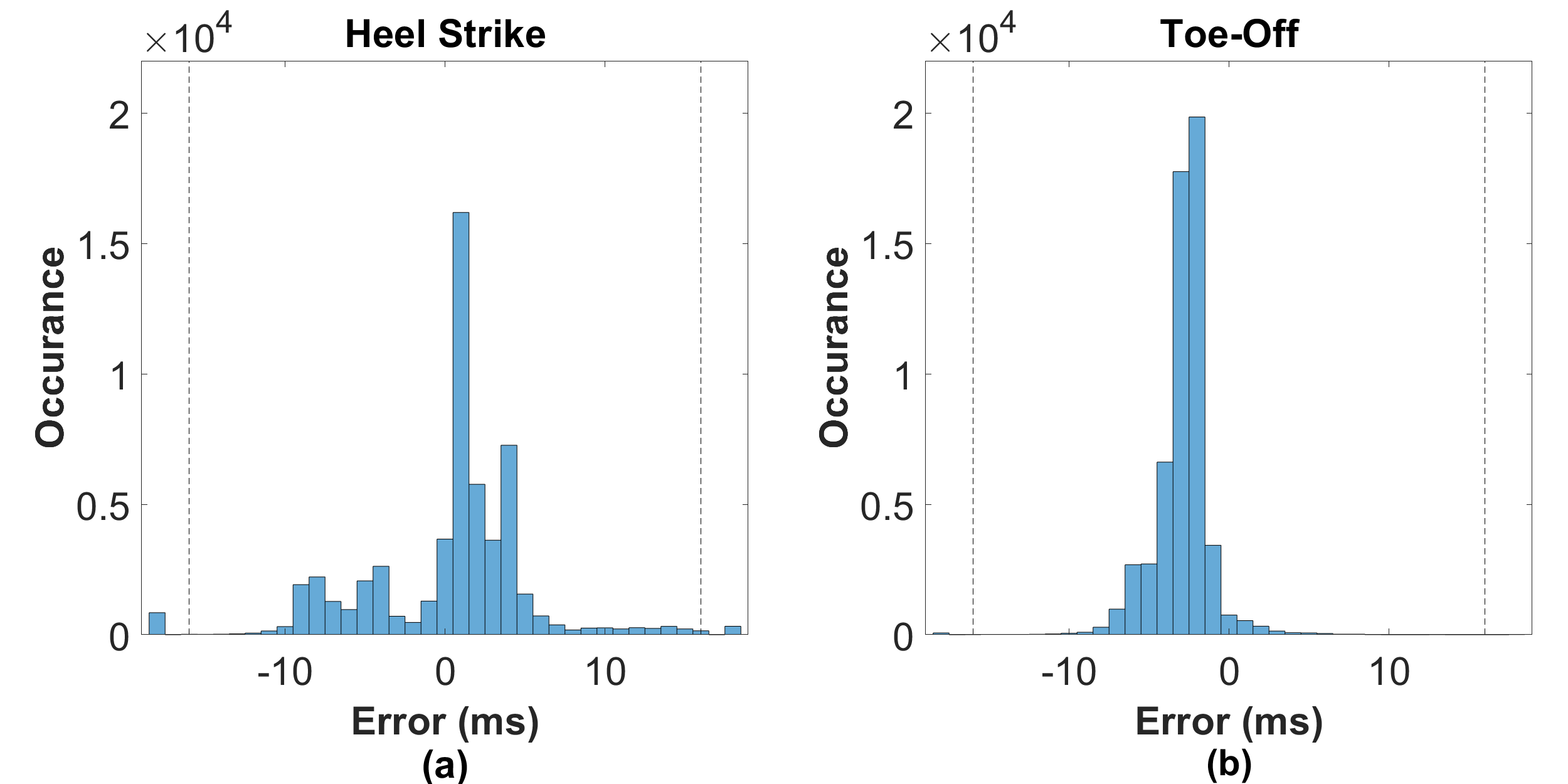
Histograms for Gait Event Detections
Project: Enhanced Data Processing for Exoskeleton-Assisted Walking Trials
2022-2023
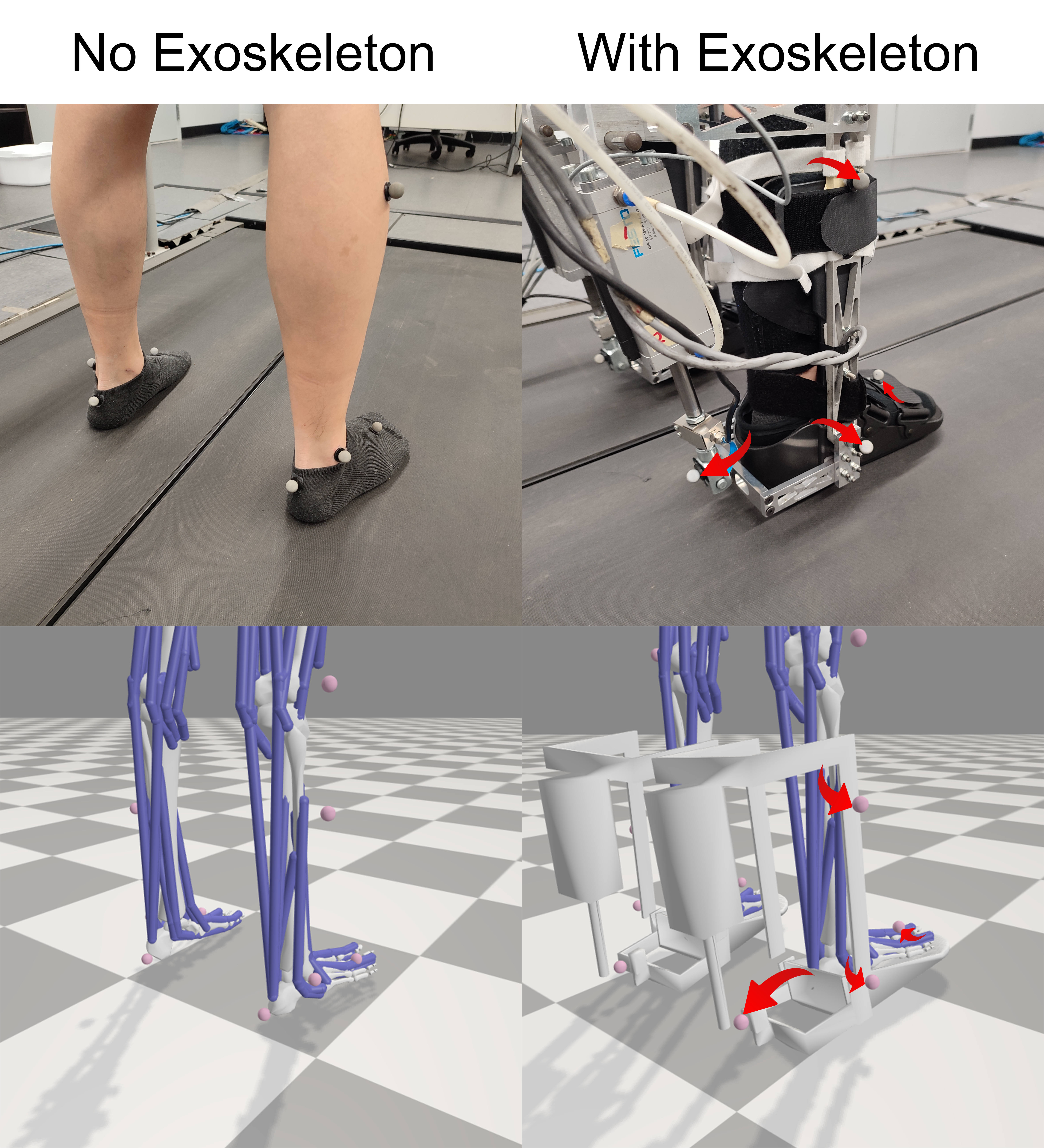
This project mainly focuses on the implementation of the extraction of inverse kinematics (IK) and inverse dynamics (ID) data from exoskeleton walking trials. The challenges were posed by Vicon's motion-capturing system, due to the altered marker position for human subjects wearing exoskeletons. By mastering the use of OpenSim’s inverse kinematics functions and teaching myself how to perform inverse dynamics analyses, I developed custom exoskeleton-musculoskeletal models. The MATLAB scripts can efficiently transfer data from Vicon to OpenSim, significantly improving the GO lab's workflow and data verification processes.
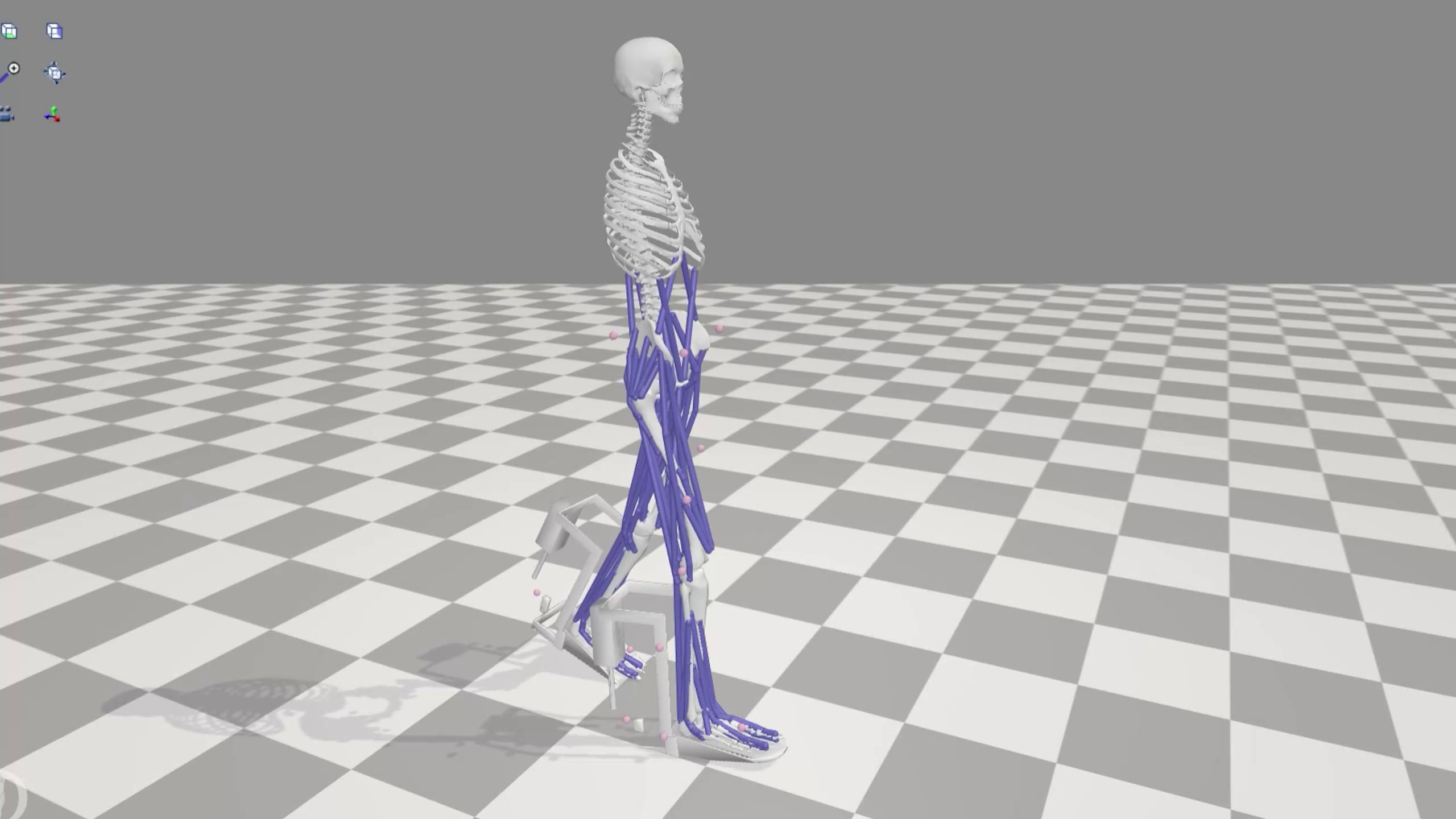
Exoskeleton Walking Simulation Video
Download Inverse Dynamics Tutorial PDF