Gait Optimization (GO) Lab
简介

宾夕法尼亚州立大学的Gait Optimization Lab研究人类步态模式。团队专注于增强人类康复的技术。为了研究步态,他们采用了最初为机器人开发的方法,这些方法已被改编得更接近人类运动。此外,实验室还使用了包括优化、控制和机械设计在内的各种工程工具。
主导师: Anne Martin,教授, 宾夕法尼亚州立大学机械工程系
点击了解更多关于GO Lab的信息
用于外骨骼辅助行走的自动步态周期检测
2023-2024
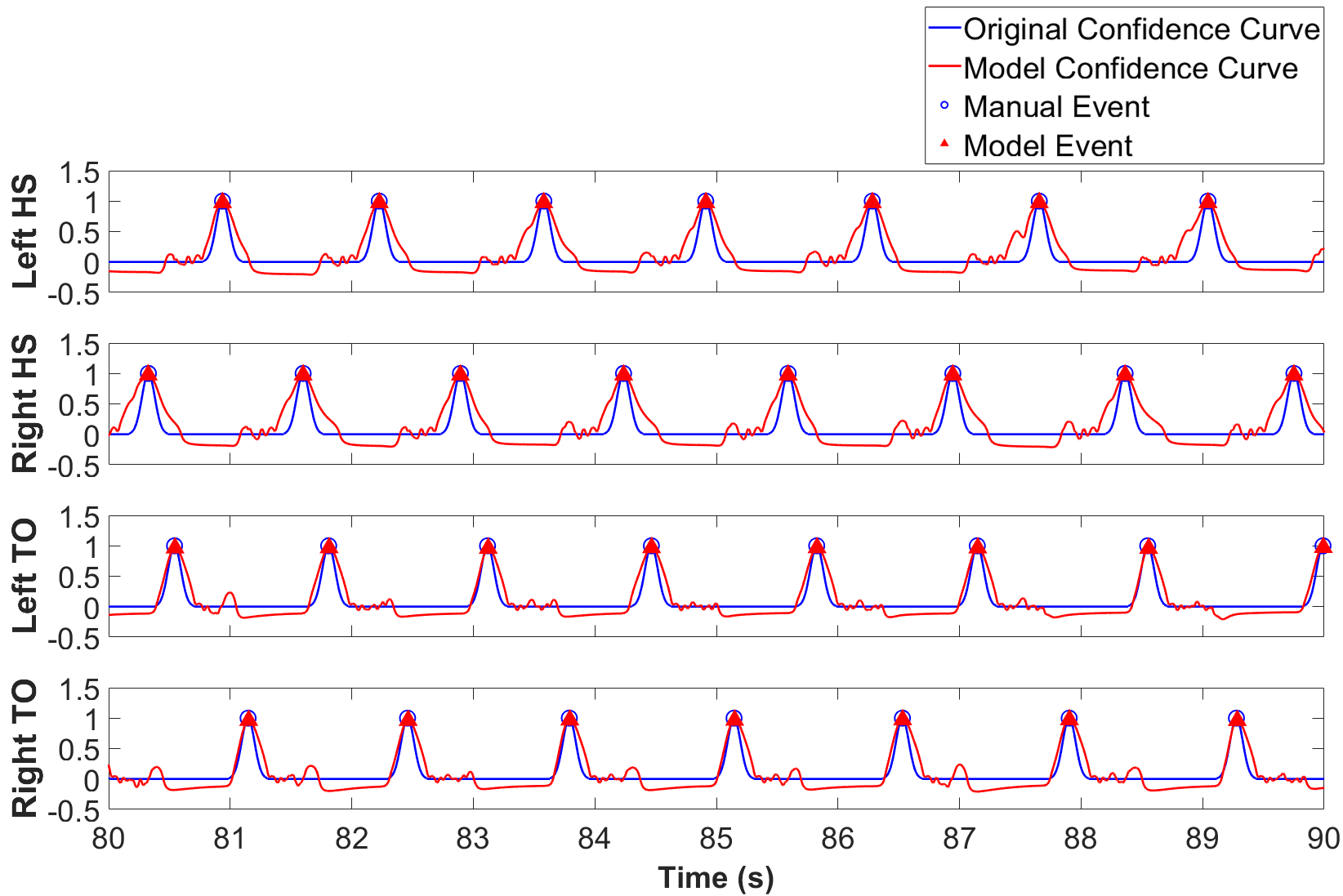
本研究开发了一种基于机器学习的方法,用于准确检测外骨骼辅助行走中的关键步态事件——脚跟着地(HS)和脚尖离地(TO),因为传统方法不适用于外骨骼的步态事件检测。我们利用地面反作用力和运动学数据训练了两个独立的LSTM模型,以提高事件检测的准确性。模型处理了113,236个事件,实现了HS超过98%和TO超过99%的准确率,且时间误差在16ms以内,显著超越了以前的技术。此方法不仅展示了卓越的精度和强大的通用性,还大大减少了步态分析所需的劳动量,使其成为临床和研究应用的有效工具。
从宾夕法尼亚州立大学数据共享平台获取本研究的MATLAB脚本和示例数据论文:
Chen, X., Martin, A., Automated gait event detection for exoskeleton-assisted walking using a long short-term memory model with ground reaction force and heel marker data., PLoS One. 2025 Feb 10;20(2):e0315186. https://doi.org/10.1371/journal.pone.0315186
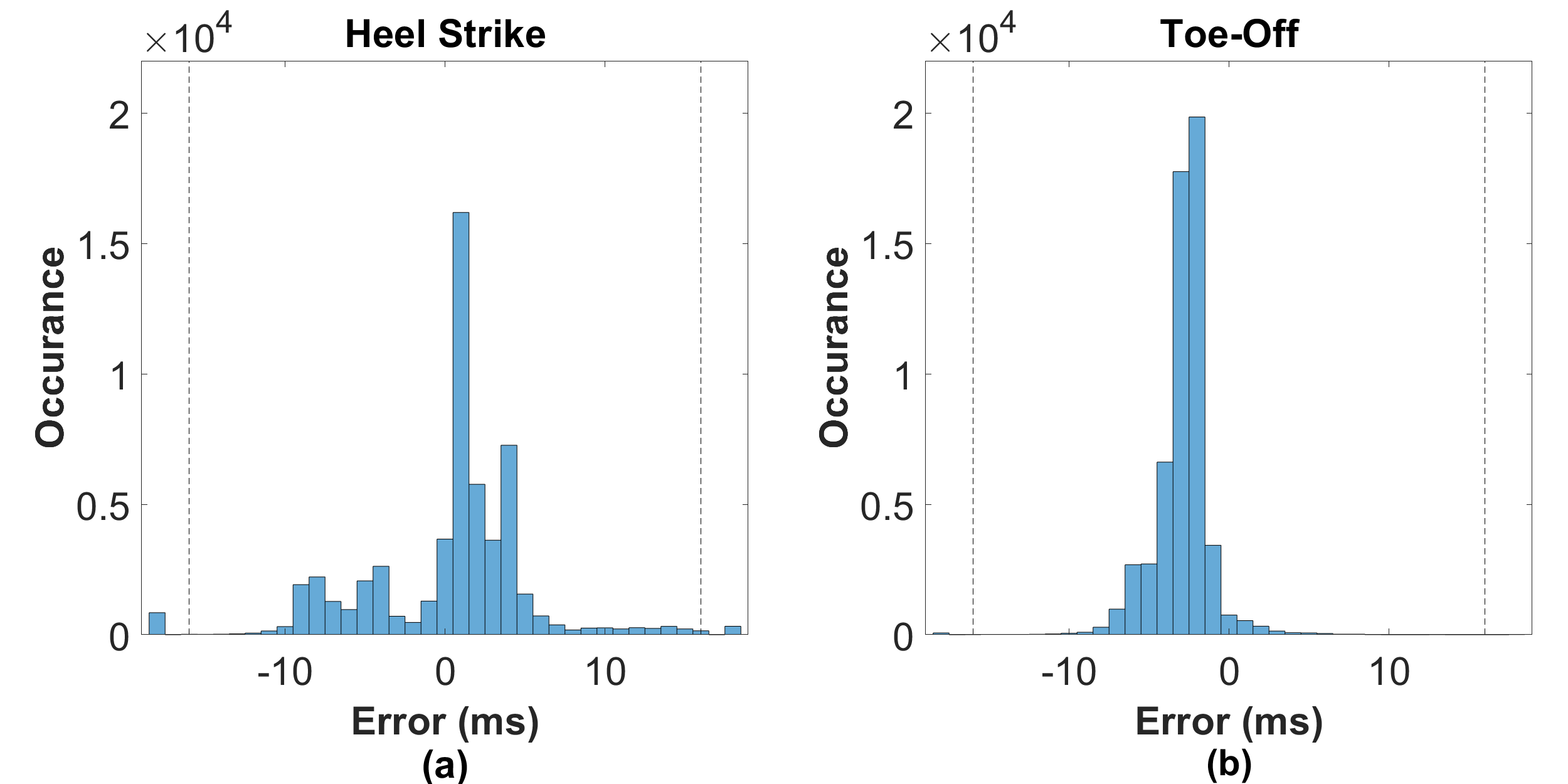
步态事件检测的直方图
项目: 增强外骨骼辅助行走试验的数据处理
2022-2023
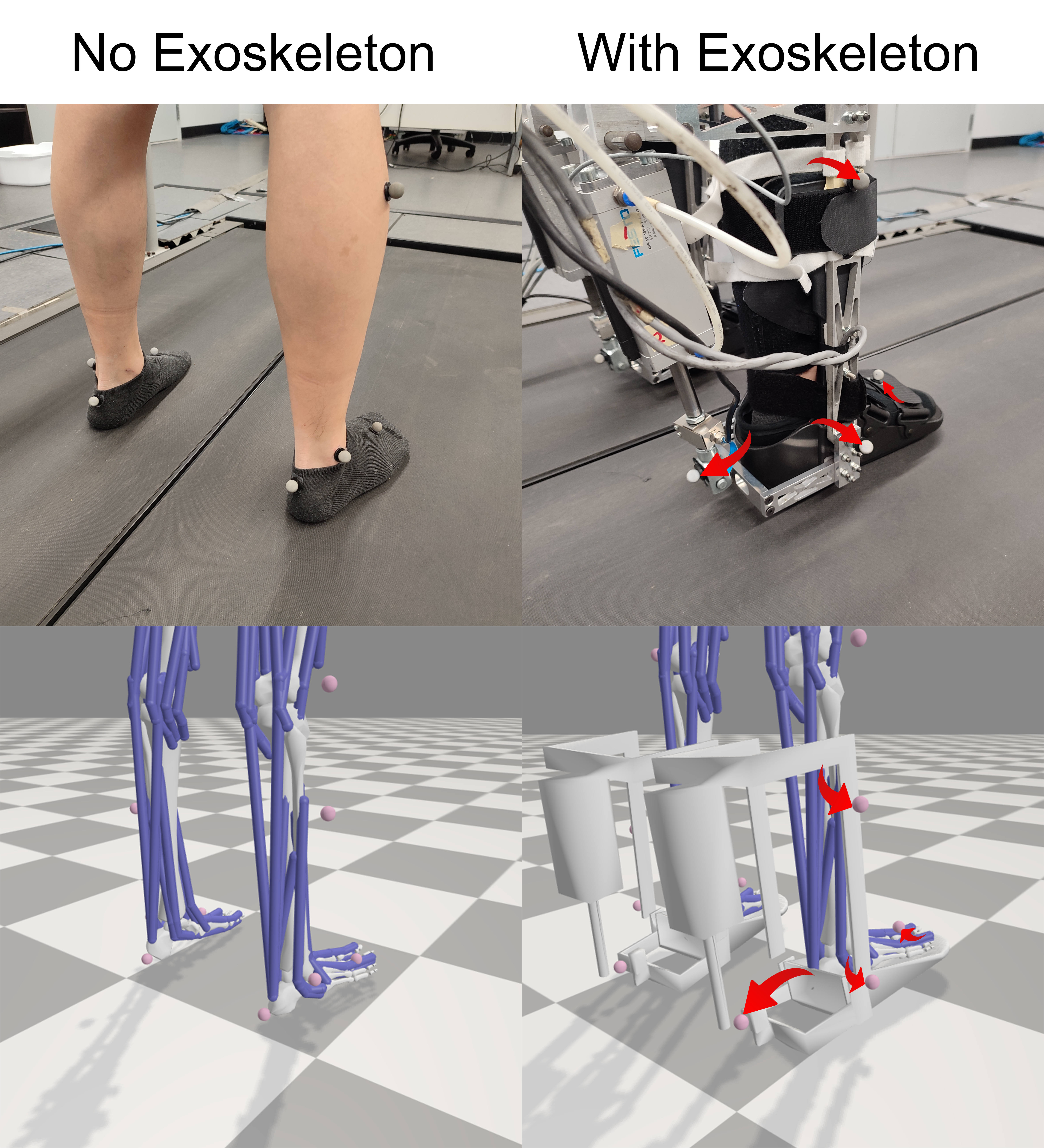
本项目的主要目的为从外骨骼行走试验中提取逆运动学(IK)和逆动力学(ID)数据。由于穿戴外骨骼的人体标记位置发生变化,Vicon的运动捕捉系统变得不再稳定。因此,通过掌握OpenSim的逆运动学功能并自学逆动力学分析,我开发了定制的外骨骼-肌肉骨骼模型。我同时编撰了可以高效地将数据从Vicon传输到OpenSim的MATLAB脚本,大幅改善了GO实验室的工作流程和数据验证过程。
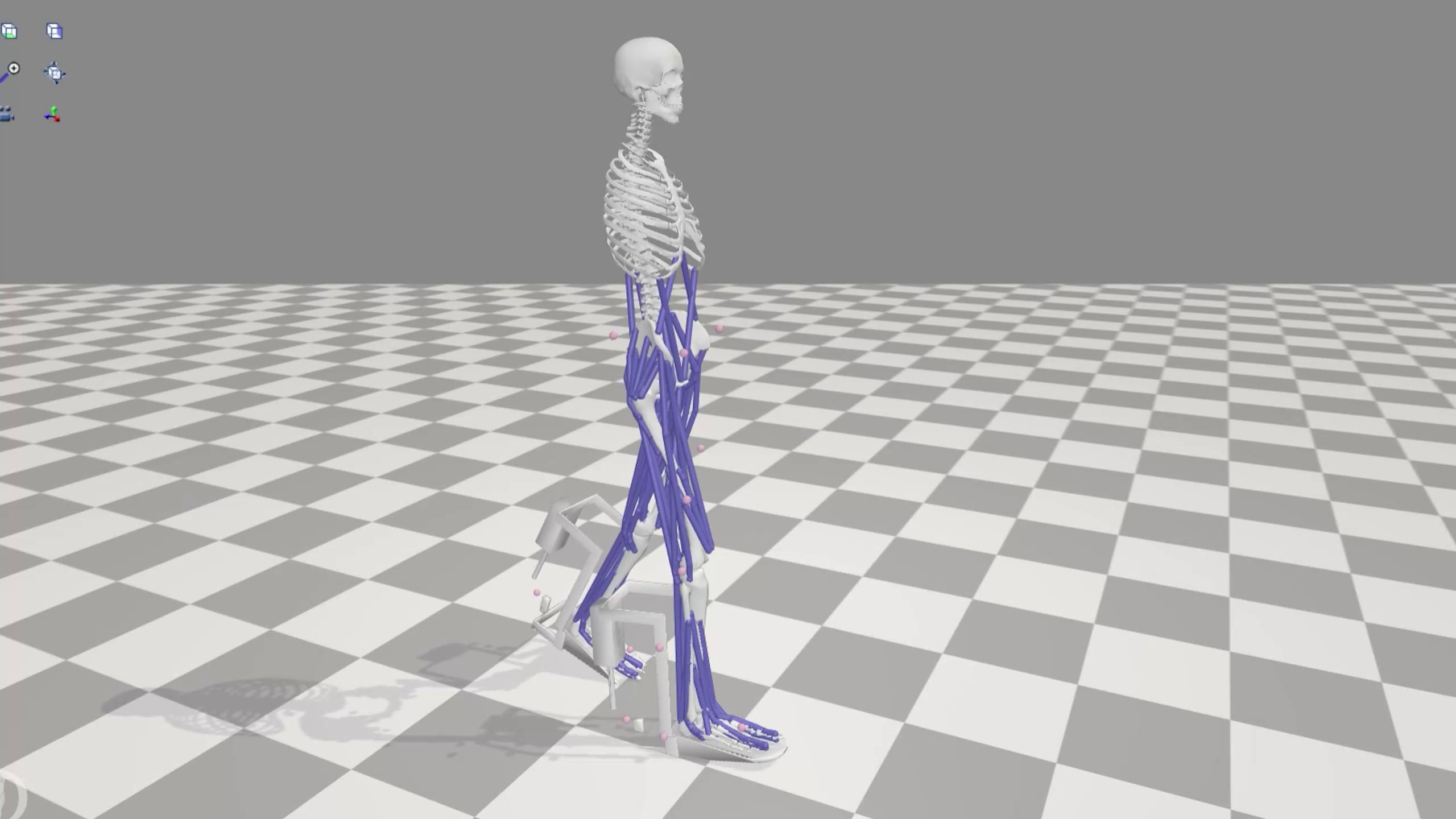
外骨骼行走模拟视频
下载逆动力学教程PDF(英文)